





Oasis montaj is desktop software for geoscientists working with magnetic, gravity, electromagnetic, resistivity, and radiometric data. It supports the full geophysical workflow in a single project environment.
Teams use it to manage large datasets, maintain traceability, and prepare technical and regulatory deliverables, with geological and geochemical context where needed.
Key Benefits
Why geophysicists rely on Oasis montaj
Process field data for interpretation
Manage large, diverse datasets
Build data-driven interpretations
Tailor workflows to project needs
Collaborate across disciplines and workflows
Reduce drilling or remediation risk and cost

Don’t just use Oasis montaj, master it.
The Oasis montaj Webinar Mastery Series is designed to help you bridge the gap by moving beyond the basics to advanced workflows to precisely process, and analyse your data.
Key Features
Key capabilities supported across geophysical workflows
These capabilities describe the types of geophysical workflows Oasis montaj supports, from survey planning and quality control through to interpretation. They reflect the breadth of work that can be carried out using Oasis montaj across different methods and project types.
For more information about Oasis montaj products and pricing, talk to us
Product options
Find the Oasis montaj package that fits your workflow
Oasis montaj is available in a small number of licence options that cover different scopes of geophysical work. Each option builds on the same core functionality and can be extended as project requirements change.
Licensing note: Most Oasis montaj products and extensions are available as 12‑month named or shared subscriptions. VOXI is licensed separately from Oasis montaj using a consumption‑based model, and Oasis montaj Ultimate also supports short‑term (daily) access options.
Extensions
Add extensions to Oasis montaj
Oasis montaj extensions are software options you can add to support specific geophysical methods and tasks.
Acquisition
Support survey planning, data validation, and field‑level quality control for airborne and ground geophysical surveys.
Processing
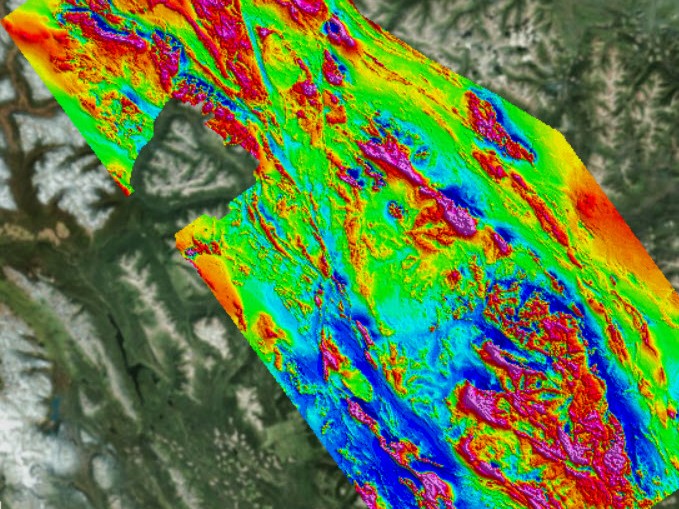
Prepare gravity, magnetic, electromagnetic, and radiometric datasets using correction, filtering, and transformation workflows.
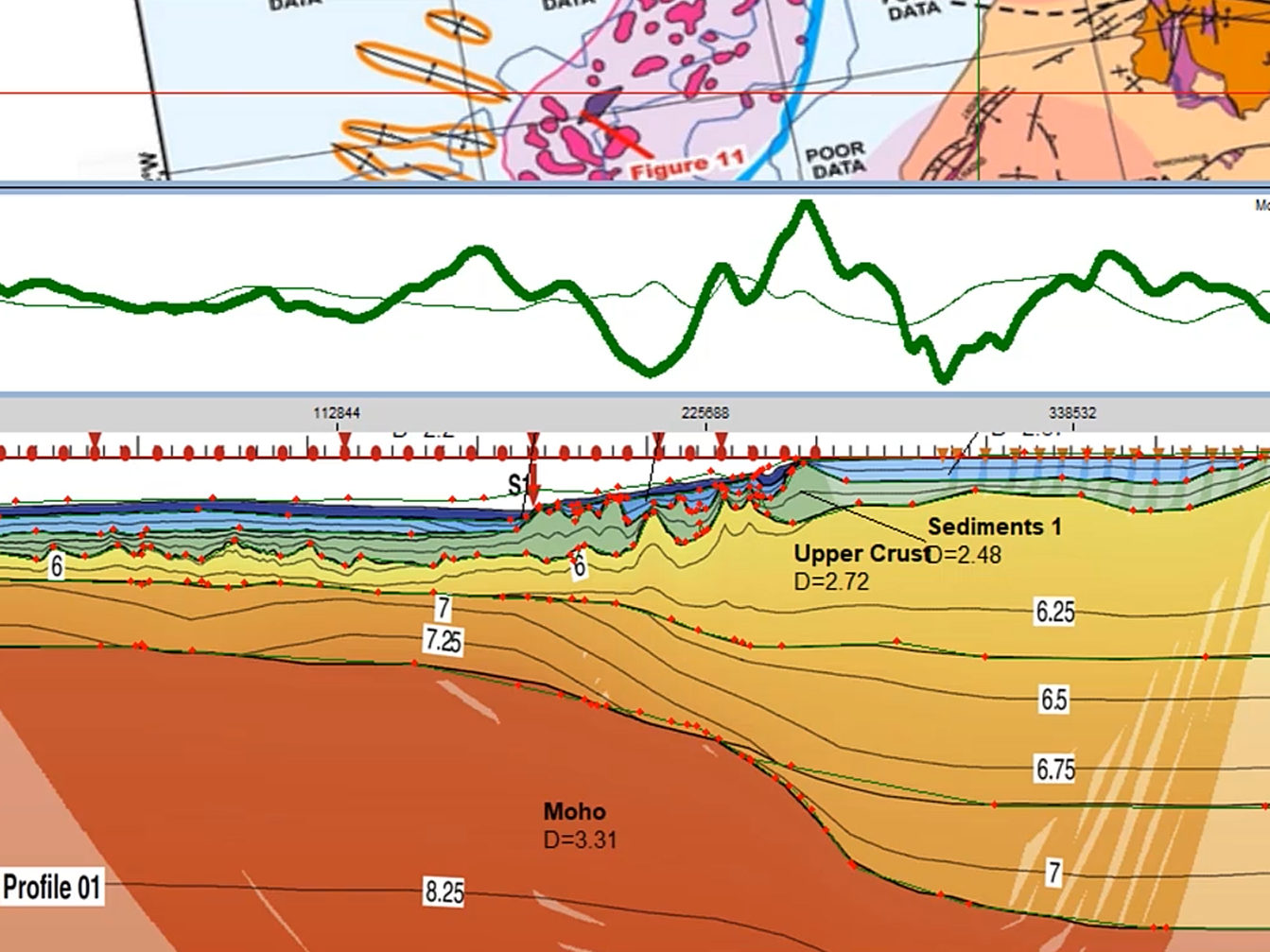
Interpretation
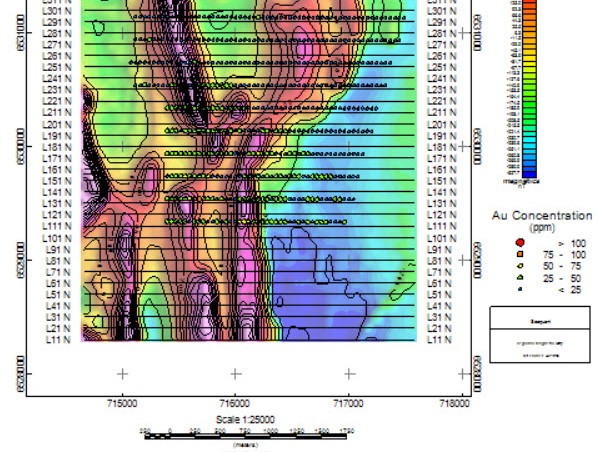
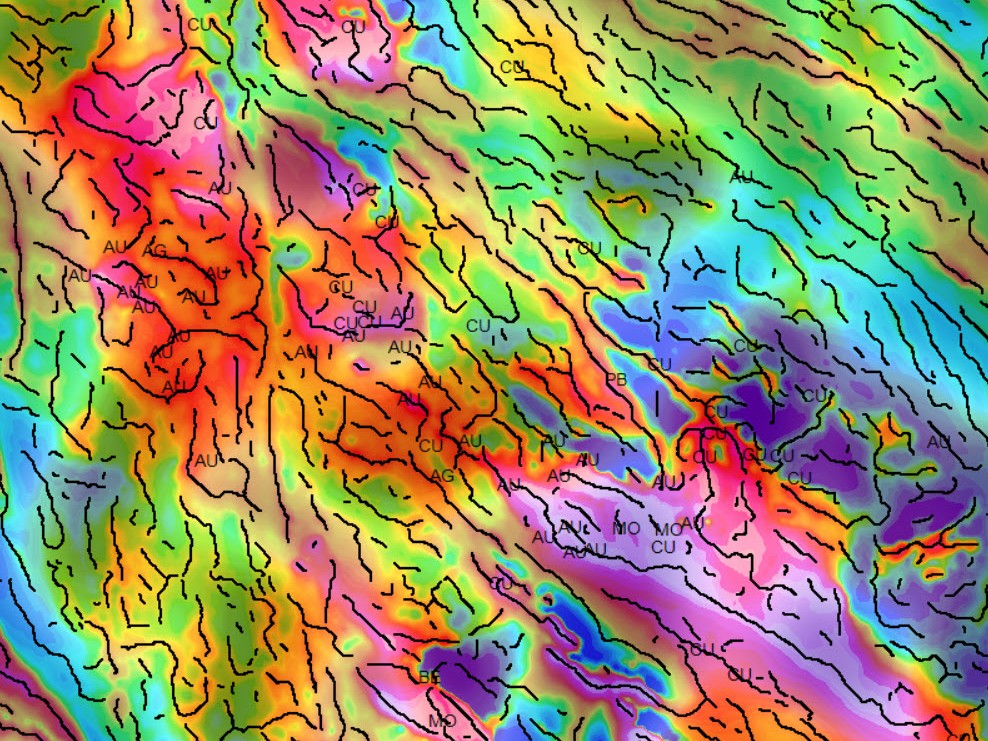
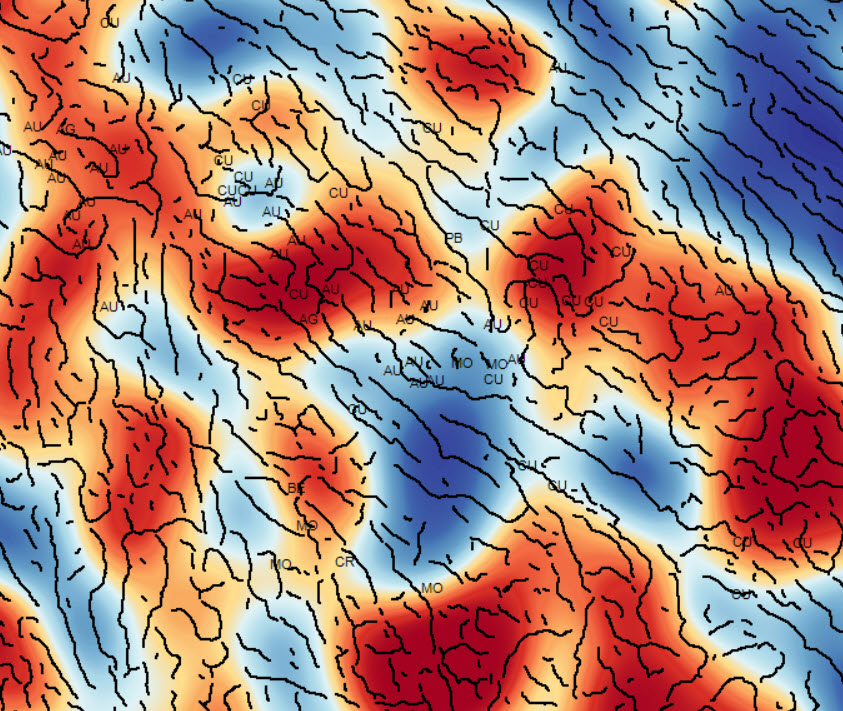
Interpret potential‑field data using depth‑to‑source estimation, structural analysis, and 2D and 3D visualisation techniques.
Resistivity and induced polarisation (DC-IP)
Prepare DC resistivity and induced polarisation survey data through geometry validation, pseudosections, and inversion‑ready workflows.
Radiometric processing
Process airborne and ground‑based gamma‑ray spectrometry data, including calibration, noise reduction, and radiometric product generation.

The Radiometric Processing Extension was developed with Medusa Radiometrics
Geology
Integrate geological and geochemical data into geophysical projects, including drillhole plotting, geological mapping, and combined interpretation views.
Offshore hazard detection
Detect and model magnetic anomalies associated with subsea objects for offshore UXO and infrastructure investigations.
Onshore hazard detection
Identify and assess subsurface hazards on land using magnetic and electromagnetic survey data.
Onshore hazard classification
Analyse advanced electromagnetic data to classify subsurface targets and support regulatory‑compliant UXO decisions.
For more information about Oasis montaj products and pricing, talk to us
Add-ons
Add cloud inversion with VOXI
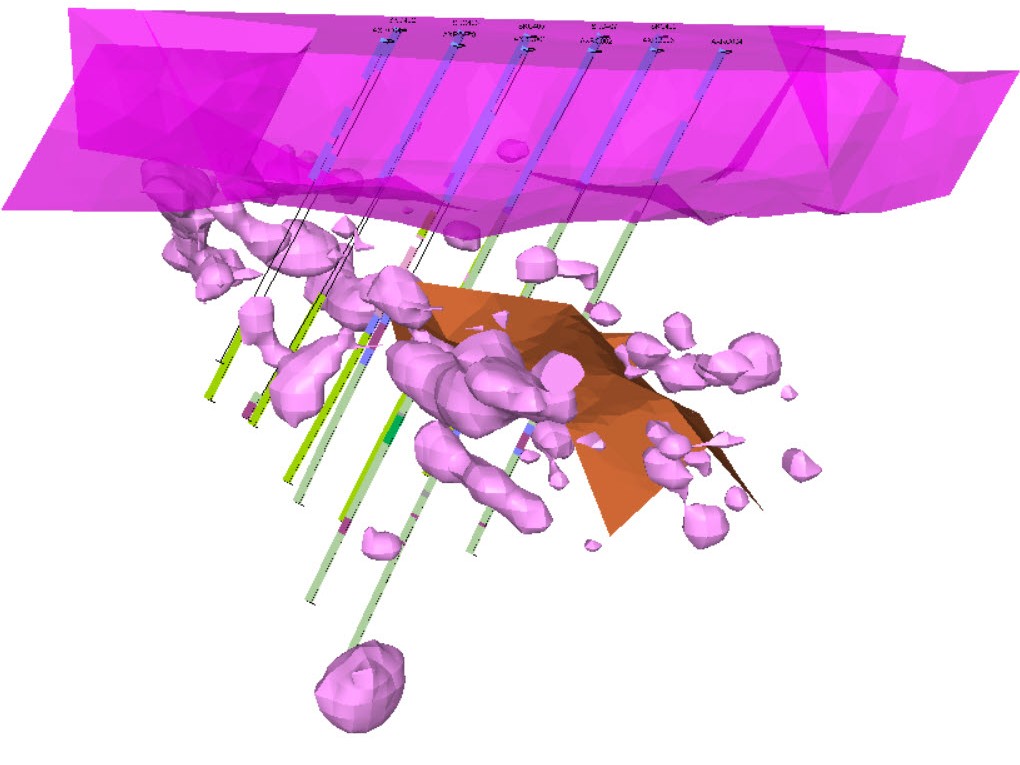
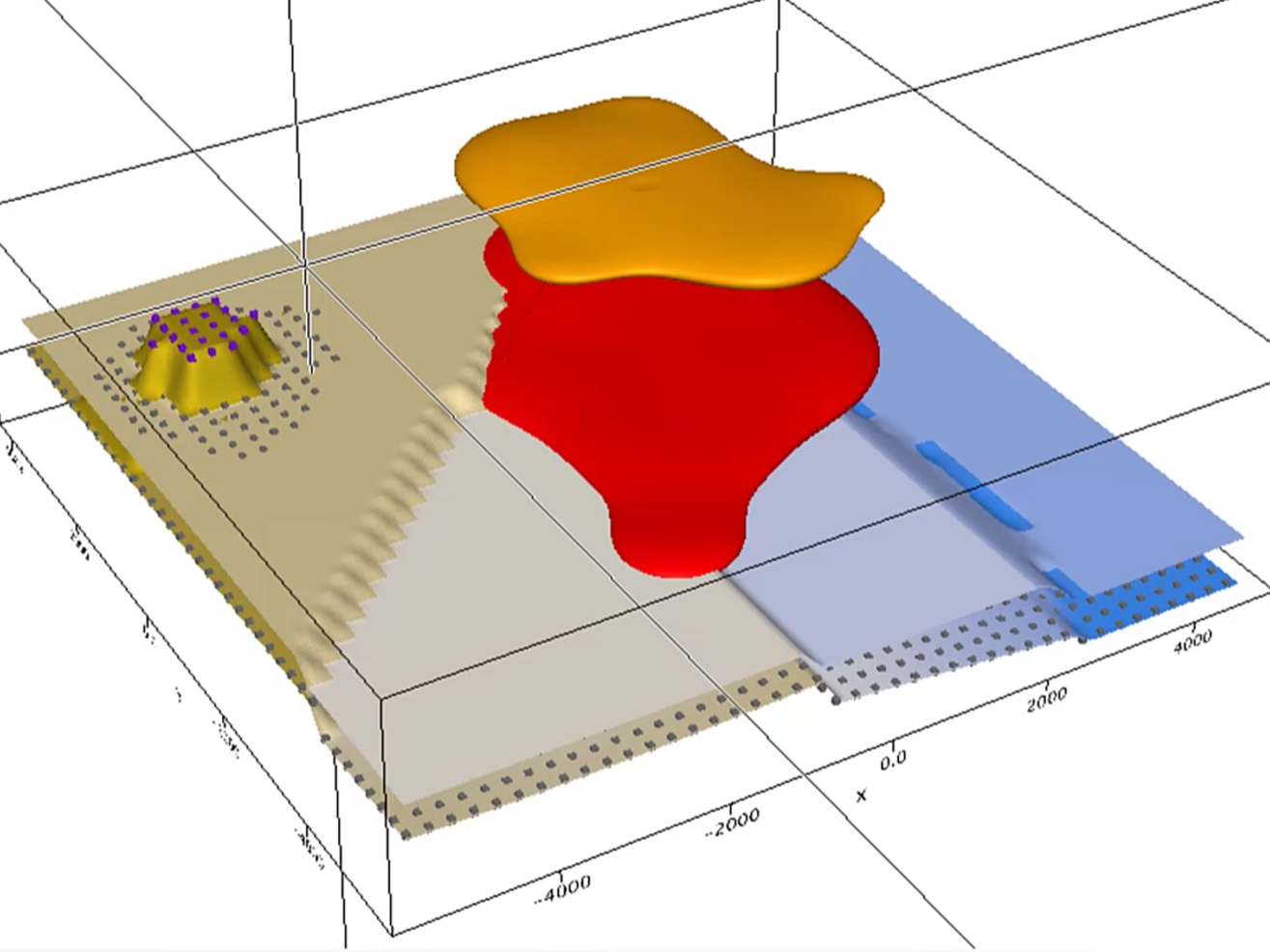
Run computationally intensive geophysical inversions in the cloud and bring the resulting models back into Oasis montaj for interpretation. It’s used when datasets are large or inversion workloads exceed what’s practical on the desktop. VOXI is a single cloud inversion service. The options below show the survey methods and physical properties it supports.
VOXI Essentials
12 month named or shared licenseRun 3D voxel inversion on gravity and magnetic data to generate 3D models of physical properties such as density and magnetic susceptibility. Used for large or high‑resolution potential‑field datasets.
VOXI IP and Resistivity
12 month named or shared licenseun 3D inversion on time‑domain IP and DC resistivity data to generate conductivity/resistivity and chargeability models. Supports diverse electrode configurations and time‑series data for subsurface investigations.
VOXI Gravity Gradient
12 month named or shared licenseRun high‑resolution 3D density inversion on gravity gradiometry data, suited to structurally complex settings and subtle density contrasts.
VOXI Time Domain EM
12 month named or shared licenseRun inversion to generate 3D conductivity models from time‑domain EM systems (SkyTEM, VTEM, Xcite). Commonly used to image conductive bodies at depth in mineral exploration and groundwater studies.
VOXI Frequency Domain EM
12 month named or shared licenseRun conductivity/resistivity inversion on frequency‑domain EM data from airborne and ground surveys to support geological structure delineation.

“Using Seequent’s Oasis montaj software to process our latest geophysical data helped us to move beyond decades-old maps to create an updated, detailed inventory of the entire country’s natural resources.”
John Ogalo, Chief Superintending Geologist (KGS) and KNAGS Project Leader
Read about the Geophysical Survey case study hereInsights & impact
Oasis montaj at work
Explore case studies and articles showcasing how Oasis montaj is used in research and industry.





FAQ
Frequently asked questions
Is Oasis montaj suitable for both airborne and ground surveys?
Yes. Oasis montaj supports workflows for airborne and ground‑based geophysical surveys, including gravity, magnetic, electromagnetic, resistivity, and radiometric data. Tools are available for survey planning, data quality control, processing, and interpretation across different acquisition types.
How does Oasis montaj work with geological data?
Oasis montaj allows geophysical data to be combined with geological maps, drillholes, and geochemical data within the same project. Geological information can also be used to constrain geophysical inversions and support integrated interpretation workflows.
What’s the difference between Oasis montaj Base, Basin Modelling, and Ultimate?
Each Oasis montaj license includes a different set of interpretation and modelling tools, depending on the type of work you need to do.
- Oasis montaj Base includes the core tools for working with gravity and magnetic data. You can import, process, filter, correct, map, and interpret data, manage large datasets, and produce standard interpretation outputs. Base supports projects of any size where advanced modelling is not required.
- Oasis montaj Basin Modelling builds on Base by adding specialised 2D filtering and modelling tools for gravity and magnetic data. These tools are used for basin‑scale and regional interpretation, such as layered‑earth analysis, depth‑to‑source work, and structural modelling of large subsurface features.
- Oasis montaj Ultimate includes all Oasis montaj desktop tools in a single licence, covering gravity, magnetic, radiometric, resistivity, and electromagnetic methods. It also includes advanced modelling tools such for 3D gravity and magnetic basin modelling. Ultimate is designed for teams working on complex, multi‑method projects who want the full set of capabilities without managing multiple licences.
Can Oasis montaj handle large datasets?
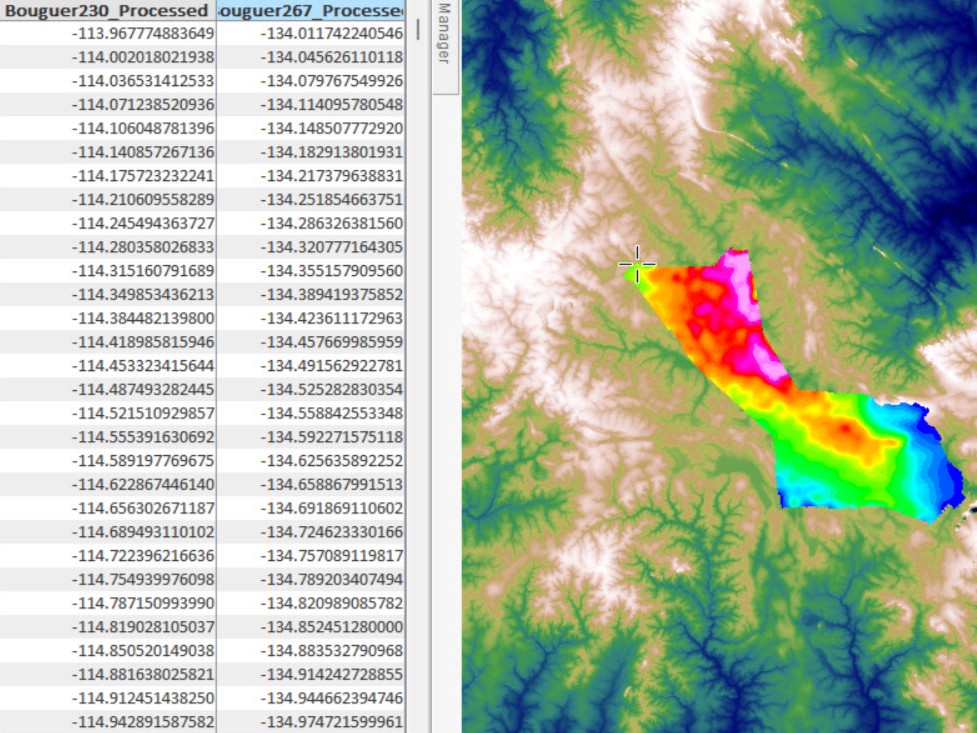
Yes. Oasis montaj is designed to manage large, multi‑format geophysical datasets, including national‑scale surveys. Its database and processing tools support millions of data points across more than 50 industry formats.
How does cloud-based inversion work with Oasis montaj?
Oasis montaj connects to VOXI cloud services for computationally intensive 3D inversion and modelling.
Results generated in the cloud are returned to Oasis montaj for visualisation and interpretation alongside other geoscience data.